двумя величинами (см. (3.4) и (3.5)): скоростью электромагнитного поля статора w и скольжением s:
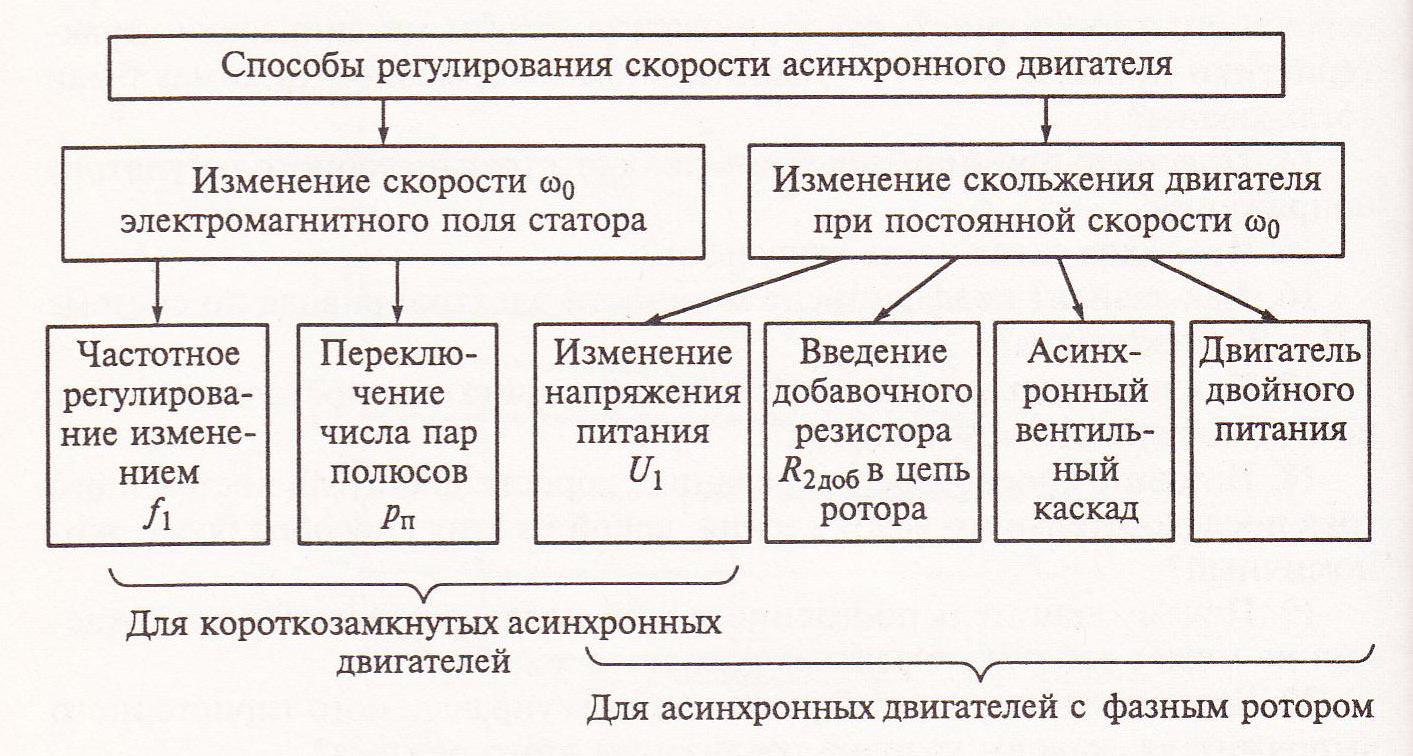
Исходя из (6.1) принципиально возможны два способа регулирования скорости: регулирование скорости поля статора и регулирование скольжения при постоянной скорости поля статора.
Скорость поля статора определяется двумя величинами (см. (3.1)): частотой напряжения f1 подводимого к обмоткам статора, и числом пар полюсов двигателя рп.
В соответствии с этим возможны два способа регулирования скорости поля статора: изменение частоты напряжения питания посредством преобразователей частоты, включаемых в цепь статора двигателя (частотное регулирование), и путем изменения числа пар полюсов двигателя.
Регулирование скольжения двигателя при постоянной скорости поля статора для короткозамкнутых асинхронных двигателей возможно путем изменения напряжения статора при постоянной частоте этого напряжения. Для асинхронных двигателей с фазным ротором, кроме того, возможны еще два способа: введение в цепь ротора добавочных резисторов (реостатное регулирование) и введение в цепь ротора добавочной регулируемой ЭДС посредством преобразователей частоты, включаемых в цепь ротора (асинхронный вентильный каскад и двигатель двойного питания).
В настоящее время благодаря развитию силовой преобразовательной техники созданы и серийно выпускаются различные виды полупроводниковых преобразователей частоты. Это определило опережающее развитие и широкое применение частотно-регулируемого асинхронного электропривода. Основные достоинства этого электропривода следующие:
- плавность регулирования и высокая жесткость механических характеристик, что позволяет регулировать скорость в широком диапазоне;
- экономичность регулирования, определяемая тем, что двигатель работает с малыми значениями абсолютного скольжения и потери в двигателе не превышают номинальных.
Недостатками частотного регулирования являются сложность и высокая стоимость (особенно для приводов большой мощности) преобразователей частоты, а также сложность реализации в большинстве схем режима рекуперативного торможения.
Изменение скорости переключением числа пар полюсов асинхронного двигателя позволяет получать от двух до четырех рабочих скоростей, т. с. плавное регулирование скорости и формирование переходных процессов при этом способе невозможно. Поэтому, хотя данный способ имеет определенные области применения, он не может рассматриваться как основа для построения систем регулируемого электропривода.
Регулирование скорости асинхронного двигателя изменением питающего напряжения при постоянной (стандартной) его частоте было рассмотрено в гл. 3. Было отмечено, что этот способ регулирования для асинхронных двигателей с короткозамкнутым ротором имеет весьма ограниченное применение вследствие того, что регулирование скорости здесь сопряжено с потерями энергии скольжения в роторе двигателя, ведущими к его перегреву. Получаемые при этом способе механические характеристики нехороши для качественного регулирования. Диапазон регулирования не превышает 1,5:1; больший диапазон регулирования скорости можно допускать только кратковременно. Исходя из этого регулирование изменением напряжения питания применяется главным образом только для обеспечения плавного пуска нерегулируемых асинхронных электроприводов или для кратковременного снижения скорости. Иногда этот способ регулирования используется для регулирования скорости насосов и вентиляторов (механизмов с вентиляторным характером нагрузки) небольшой мощности (до 15 кВт), однако и в этом случае необходимо увеличение установленной мощности двигателя.
Для асинхронных двигателей с фазным ротором регулирование скорости может проводиться воздействием на роторную цепь двигателя. При введении добавочных резисторов в цепь ротора энергия скольжения рассеивается не в объеме двигателя, а в резисторах. Этот способ регулирования не экономичен, так как значительная часть энергии расходуется в добавочных резисторах. При использовании релейно-контакторных схем исключается плавность регулирования скорости. В настоящее время управление с введением добавочных резисторов в цепь ротора используется в основном для пуска асинхронных двигателей с фазным ротором.
Все способы регулирования, основанные на изменении скольжения асинхронного двигателя, связаны с выделением энергии скольжения в роторной цепи двигателя. В рассматриваемых выше способах эта энергия расходовалась на нагрев обмотки ротора и роторных резисторов. Существуют системы регулируемого электропривода, в которых энергия скольжения не теряется в резисторах, а используется полезно: возвращается в питающую сеть, что делает регулирование в этих системах экономичным. К таким системам регулируемого привода относятся асинхронные вентильные каскады и двигатели двойного питания. Особенностью каскадных схем асинхронного привода является ограниченный диапазон регулирования — не больше чем 2:1. В этом диапазоне каскадные схемы обеспечивают плавное и экономичное регулирование скорости. Такие системы электропривода наиболее целесообразны для мощных турбомеханизмов — насосов и вентиляторов.
Асинхронные электроприводы с частотным регулированием скорости
Частотное регулирование скорости асинхронного двигателя путем изменения частоты напряжения питания возможно благодаря тому, что скорость электромагнитного поля статора пропорциональна частоте напряжения питания:
Следует также учесть, что поскольку с изменением частоты напряжения питания изменяется и поток двигателя Ф2:
то в большинстве случаев одновременно с изменением частоты напряжения питания необходимо регулировать и его амплитуду. Регулирование напряжения при уменьшении частоты ниже номинальной частоты необходимо потому, что из-за уменьшения индуктивного сопротивления обмоток двигателя ток намагничивания будет возрастать, что приведет к насыщению магнитопровода двигателя и его перегреву. Регулирование напряжения следует проводить таким образом, чтобы скольжение двигателя было минимальным.
Для реализации способа частотного регулирования асинхронный короткозамкнутый двигатель включают в сеть (рис. 2) с параметрами Uc = const и fc = const через преобразователь частоты UZ. В качестве преобразователей частоты в настоящее время используют в основном полупроводниковые преобразователи частоты.
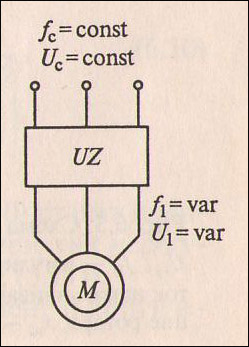
Рис. 2. Схема включения асинхронного двигателя
с питанием от преобразователя частоты
|
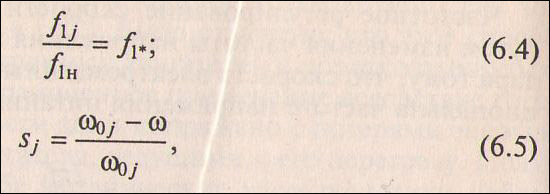
При частотном регулировании относительное скольжение Sj зависит как от абсолютного скольжения Sабс = w0 - w, так и от относительной частоты f1* напряжения питания
где f1j, w0j, Sj - регулируемые частота напряжения статора и соответствующие скорость поля и скольжение; f1н и w0н номинальные значения частоты статора и скорости поля, соответствующие паспортным данным двигателя.
Подставив (6.2) в (6.5), получим
Для анализа электромеханических характеристик двигателя при частотном регулировании рассмотрим Т-образную схему замещения двигателя (рис. 3). В отличие от ранее приведенной схемы замещения (см. рис. 3.4) в данном случае приходится учитывать, что реактивные сопротивления двигателя x1, xm, x2, xk зависят от частоты напряжения питания и изменяются с изменением частоты:
где x1н, xmн, x2н, xkн - номинальное индуктивное сопротивление соответственно обмотки статора, контура намагничивания и короткого замыкания.
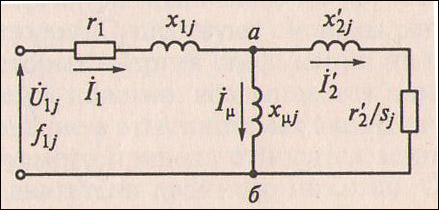
Рис. 3. Схема замещения асинхронного двигателя: