|
Частотный преобразователь - принцип действия
|
Немного о частотно-регулируемом приводе
В структуре промышленного производства асинхронный электропривод является, в настоящее время, наиболее распространенным преобразователем электрической энергии в механическую. Ввиду этого не маловажным является управление и контроль характеристиками асинхронного двигателя.
Электропривод на базе частотного регулирования состоит из электродвигателя (асинхронного или синхроннгого) и частотного преобразователя.
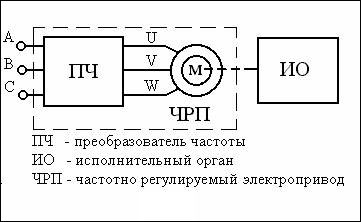 Электродвигатель преобразует потребляемую электроэнергию в механическое вращение и приводит в движение исполнительный механизм. Электродвигатель преобразует потребляемую электроэнергию в механическое вращение и приводит в движение исполнительный механизм.
Частотный преобразователь изменяет частоту питающей энегии электрического двигателя и представляя собой электронный статический узел. На выходных клемах инвертора формируется переменное напряжение с изменяемой частотой.
Регулирование скорости вращения двигателя осуществляется путем изменением частоты и амплитуды напряжения подаваемого на электродвигатель от частотного преобразователя, от сюда обусловлено название «частотный преобразователь»
В последние года мировая промышленность успешно внедряет привода на базе частотного преобразования для решения различных технических задач во всех экономических отраслях. Этот спрос объясняется техническими открытиями и разработкой инверторов на базе принципиально новых элементов, основой которых являются биполярные IGBT транзисторы с изолированным затвором. Эти транзисторы вобрали в себя преимущества двух видов полупроводника.
Принцип работы инвертора
Ниже описан принцип работы частотных преобразователей, а также методы управления, особенности и характеристики реализованные в них.
Принцип управления
В асинхронном электродвигателе скорость вращения ротора N2 в установившемся режиме отличается от скорости вращения N1 на величину скольжения S.
Скорость вращающегося магнитного поля N1 напрямую зависит от частоты напряжения питания. Подводимое трехфазное напряжение с частотой f на обмотоки статора электродвигателя создает магнитное поле. Скорость вращающегося магнитного поля определяется по формуле приведенной ниже
где: P – количество пар полюсов статора.
Перевести скорость вращения поля w1, представленной в радианах, к скорости вращения n1, представленной в оборотах в минуту, можно формуле:
где: 60 – размерность.
Если в это уравнение подставить скорость вращения поля, w1 получим:
Откуда следует, что скорость вращения ротора асинхронного электродвигателей напрямую зависит от частоты питающего напряжения.
На этой зависимости основан принцип частотного регулирования.
Измение частоты f на входных клемах электродвигателя, влияет на скорость вращения ротора.
В большинстве электрических машин переменного тока с короткозамкнутым ротором применяется скалярное и векторное управление.
Скалярное управление основано по линейному закону - частота и амплитуда завистят пропорционально друг от друга. Изменение частоты влечет изменение амплитуды питающего напряжения тем самым изменяя уровень крутящего момента, к.п.д. и коэффициента мощности электродвигателя.
Скалярное управление поддерживает на одном уровне отношение макс. момента электродвигателя к моменту нагрузки на выходном валу. Если измененить частоту - изменяется амплитуда напряжения, но отношение макс. момента электродвигателя к моменту нагрузки на валу двигателя не изменится. Отношение макс. момента к к моменту нагрузки называется перегрузочная способность двигателя. При постоянном отношении перегрузочной способности номинальные коэффициент к.п.д и мощности электродвигателя на всех частотах вращения фактически не изменяются.
Максимальный момент, электродвигателя можно найти по следующей формуле:

где: k - постоянный коэффициент.
Исходя из вышеизложенного, зависимость питающего напряжения от выходной частоты определяется моментом нагрузки на валу электродвигателя.
Для поддержания равномерного момента нагрузки частотный преобразователь поддерживает постоянное отношение амплитуды напряжения к выходной частоты U/f = const, фактически обеспечивается постоянство макс. момента электродвигателя. Наглядно это видно на рис. 2.
Векторное управление позволяет существенно удерживать постоянство момента во всей области регулирования частоты, повысить точность, увеличить реакцию электропривода на изменение выходной нагрузки. Векторное управление обеспечивает непосредственное управление моментом вращения электродвигателя.
Момент вращающения зависит от тока статора. Протекая в цепи ток создает возбуждающее магнитное поле. Векторное управление позволяет изменять фазу статорного тока, то есть вектор тока при непосредственном управлении моментом.
Для изменения вектора тока (положения магнитного потока статора относительно вращающегося ротора) нужно всегда точно знать положение ротора. Решенить эту задачу можно с помощью внешнего датчика положения ротора (энкодера), либо расчитав положение ротора путем математических вычислений.
« НАЗАД
Мы всегда рады видеть у себя наших старых партнеров и ждем новых.
Доставка во все регионы России!
|



